
Projects

AISS: Automatic Implementation of Secure Silicon
The Automatic Implementation of Secure Silicon (AISS) program aimed to reduce the complexity and overhead associated with developing secure integrated circuits. While this was a collaborative effort rather than an individual project, I contributed to AISS during my graduate studies.
Android GSI on Awesome and Unique Hardware
GSI stands for Generic System Image, based on the Android Open Source Project (AOSP). This is a collection of community-driven projects that I initiated, focused on reviving unique devices such as the Microsoft Surface Duo and Motorola Razr foldables with newer Android releases.

Project Evie: Tweaks on GM Alpha Platform
The GM Alpha platform serves as the foundation for several performance-oriented vehicles, including the third-generation Cadillac ATS and CTS, as well as the sixth-generation Chevrolet Camaro. In this series, I document a collection of practical upgrades that I have completed on vehicles built on the Alpha platform.

Projects with Silent Computers
For a long time, the sound of a computer was defined by its cooling system. Spinning fans, constant airflow, and the background hum of machines running day and night were simply part of the experience. Today, things are a little different, now we can build surprisingly capable systems that operate in silence.
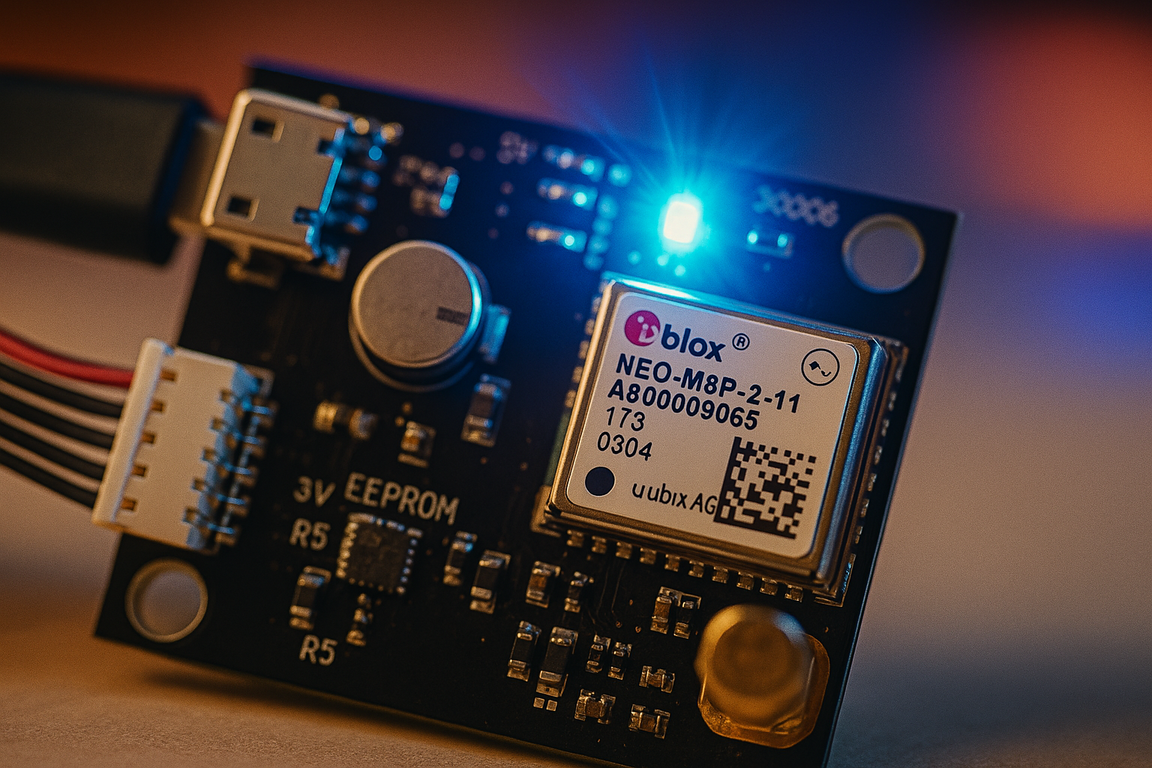
Realtime Kinematics and NTRIP
Real-Time Kinematics (RTK) GPS is a precise positioning technology that enhances the accuracy of standard GPS systems by utilizing additional information from reference stations. Traditional GPS receivers provide location information with an accuracy ranging from a few meters to several tens of meters.

Depth Map Generation on FPGA
Real-time depth map generation on low end FPGA with supporting 320x240 and 160x120 resolutions. The main objective of this project is to implement a reliable embedded system on a lower end FPGA with limited resources. This project is based on Disparity calculation based on Sum of Absolute Difference algorithm and creating a depth map.

RoboCat Drone: Robust Flying Project
Design files of the simple heavy lifting drone created for Drone enduarance race Sky of Icarus. The frame's design incorporates reinforcement at critical stress points, such as motor mounts and landing gear attachments, to distribute forces evenly and prevent structural failure.